发布日期:2025-06-25 21:34 点击次数:163
《环太平洋》名阵势之“用真东谈主驾驭机甲”日韩成人av电影,如今照进履行了。
话未几说,请看VCR:

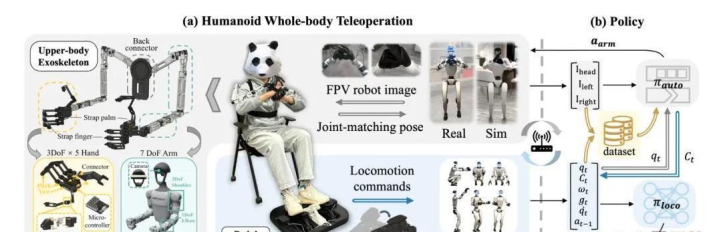
蓝本,这是上海AI Lab最新推出的东谈主形机器东谈主“驾驶舱”——HOMIE(Humanoid Loco-Manipulation with Isomorphic Exoskeleton Cockpit) 。一副机械臂外骨骼、一对算作感应手套,以及一块三轴脚踏板,东谈主们就能对双足东谈主形机器东谈主全身进行精确遥操作了。这也意味着,无需上流算作捕捉缔造,东谈主形机器东谈主也能1:1复刻东谈主类算作。

把柄运筹帷幄团队的说法,HOMIE主打一个“快准省”:快:与传统最快VR手柄集中有计算比拟,速率还要快200%,任务完成时刻裁减50%;准:处理了传统东谈主形机器东谈主遥操作濒临的全身和洽抑制难(需同期抑制出动与操作)和高精度指示获取难(依赖上流动捕缔造或视觉算法)两浩劫题,扶直其完成搬运、招引、开门等复杂出动操作任务;省:整套硬件仅约3500元东谈主民币,而且HOMIE还开源了。该系统由强化学习驱动的通顺抑制框架和低本钱同构外骨骼硬件构成,初度竣事了单一操作家对双足东谈主形机器东谈主全身的精确遥操作。
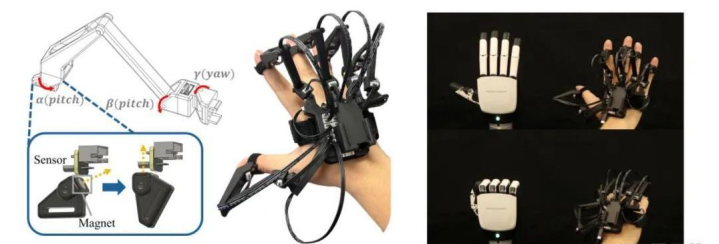
由强化学习驱动的通顺抑制框架这第一步,咱们先来拆个箱,刺目康康上头提到的“三件套”。三大中枢组件一直以来,传统东谈主形机器东谈主遥操作濒临两浩劫题:全身和洽抑制难:需同期抑制出动与操作高精度指示获取难:依赖上流动捕缔造或视觉算法而HOMIE的碎裂在于将“东谈主机同构”理念推崇到极致,其驾驶舱包含三大中枢组件:1、同构机械臂外骨骼:7目田度机械臂与机器东谈主关键逐一对应,操作家只需像抑制我方手臂一样通顺,即可精确映射机器东谈主算作,舛误小于0.09度,频率高达260Hz。2、算作感应手套:15目田度传感器捕捉手指狭窄算作,霍尔效应磁感本领竣事低本钱高精度(200东谈主民币/只),可适配多种智谋手型号。3、三轴脚踏板:通过踏板抑制机器东谈主出动速率、转向与下蹲高度,扶直“踩油门式”直观操作。
挨个来看的话。同构外骨骼机械臂是基于Unitree G1与Fourier GR-1机器东谈主形态定制,7目田度关键与机器东谈主十足对应。它选拔Dynamixel伺服电机(精度0.09°),通过URDF模子对王人坐标系,确保操作家算作与机器东谈主通顺1:1映射。无为情况下,它被固定于操作家背部与手掌,遮盖机器东谈主绝大部单干作空间且不规章东谈主体行动。
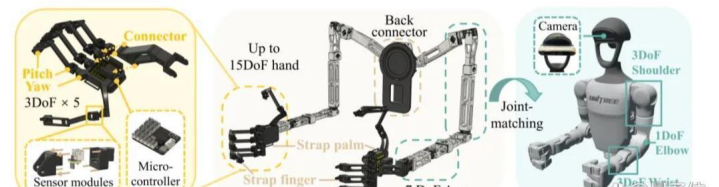
至于200元/只的算作感应手套,它每根手指配备3组霍尔传感器,捕捉指尖周折、指节偏转等15目田度算作。同期日韩成人av电影,磁铁随关键旋转改变磁场强度,通过微抑制器及时谐和为关键角度,扶直即插即用适配多种智谋手。
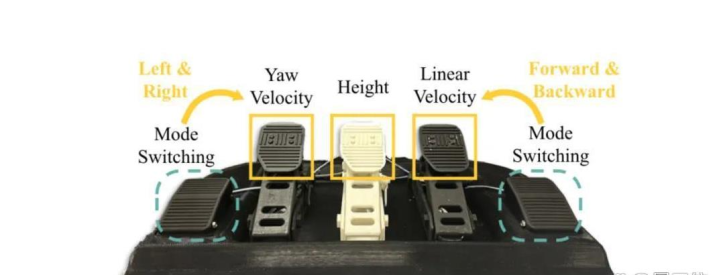
而眼下踩的三轴脚踏板,不错看到线性速率、转向角速率、下蹲高度别离由三个踏板抑制,压力信号经高精度电位器谐和。对了,模式切换按钮扶直前进/后退、左转/右转快速切换,操作逻辑肖似汽车油门。
以上瞎想能够让操作家如同“一稔”机器东谈主,透顶开脱传统VR手柄的延长与舛误。实验扫尾裸露,HOMIE的指示集中速率比最快VR有计算快200%,任务完成时刻裁减50%。尤其当操作家伸手持取物体时,机器东谈主险些同步反馈。而且,背后团队荒谬教导:由于外骨骼基于同构办法瞎想,仅手臂部分需要把柄不同机器东谈主的手臂瞎想进行微调;不外因为现行东谈主形机器东谈主手臂瞎想基本是7目田度的范式,因此这个调整并不会很大。手套和踏板部分对通盘市面上的东谈主形机器东谈主都是通用的。其次,咱们来要点谈谈HOMIE背后所选拔的强化学习。在强化学习框架中引入三大窜改本领现存的强化学习技艺无法让东谈主形机器东谈主稳固、快速地下蹲到指定位置,同期现存技艺均依赖于多数数据和通顺先验来实验机器东谈主通顺对上身姿势的适配。前者很猛进度规章了机器东谈主的可操作空间,后者则提高了机器东谈主历练的本钱。为了最猛进度拓展机器东谈主的操作空间,并保证任何机器东谈主都能快速学会在职何上身姿势下保持均衡,HOMIE在其强化学习框架中引入三大窜改本领:
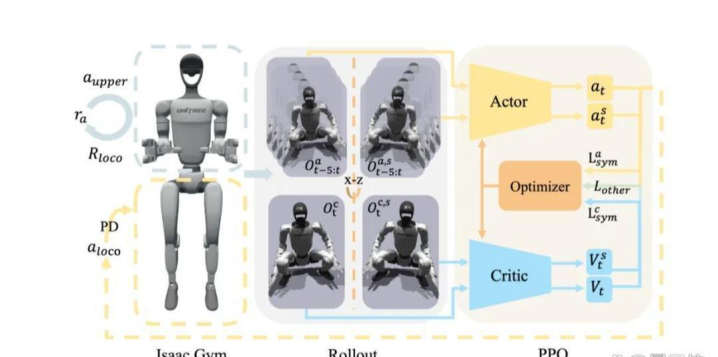
1、上半身姿势课程学习传统技艺径直立地采样上身关键角度,历练初期机器东谈主时常失衡,导致历练寂静甚而无法历练。而HOMIE引入了瞎想渐进式课程学习的技艺,使得历练历程中机器东谈主上肢算作的采样难度更平滑地进步:

开动阶段规章上身算作幅度(算作比率ra=0),此时约略率上身姿势保持默许姿势,更容易训得稳固步态;当速率追踪奖励达标后,迟缓扩大ra至1,最终采样散布变为纯立地散布(0,1);选拔特殊概率散布平滑过渡,幸免算作突变激勉的失衡。2、高度追踪奖励函数为拓展机器东谈主操作空间(如从大地捡物或高处甩掉),HOMIE在通用的追踪高度的奖励函数基础上引入了一个新的辅助函数:

该函数通过膝关键角度与方向高度的动态耦合,疏浚机器东谈主自主调整蹲姿。历练中,每次对号召的采样均保证有1/3环境专门学习下蹲,2/3环境学习赠给行走,团结个环境在两种模式下不断切换,最终不错同期学会稳固的行走和下蹲。3、对称性增强本领为了充分专揽东谈主形机器东谈主的支配对称性,幸免东谈主形机器东谈主支配不合称算作易导致失衡,HOMIE在数据集中与历练中引入镜像翻转:将不雅测情状(关键角度、速率等)沿x-z平面镜像,生成对称样本。在战术集中优化时,稀疏计较对称算作与价值的均方舛误蚀本,强制集中学习对称步履。已通过从仿真到履行的全面考据运筹帷幄东谈主员针对HOMIE强化学习框架中提议的三个新的技艺别离进行了蒸馏实验,将得到的扫尾在几个关键目的上进行测试,最终发现:1)上半身姿势课程学习不错充分匡助机器东谈主更快的学会在各式一语气变化的上身姿势下保持均衡并稳固行走,况且HOMIE的课程学习模式确乎比径直专揽立地概率进行课程学习愈加优厚;2)高度追踪奖励函数的提议比拟于只用高度追踪奖励函数,能够让机器东谈主更好、更快的学会稳固的下蹲,而浅易坑诰的调大高度追踪奖励的奖励函数比例反而会让机器东谈主的学习愈加贫乏;3)对称性增强本领的使用不啻让训得的战术愈加具有对称性,更是径直大幅提高了机器东谈主历练的速率,从而提高了数据遵循。
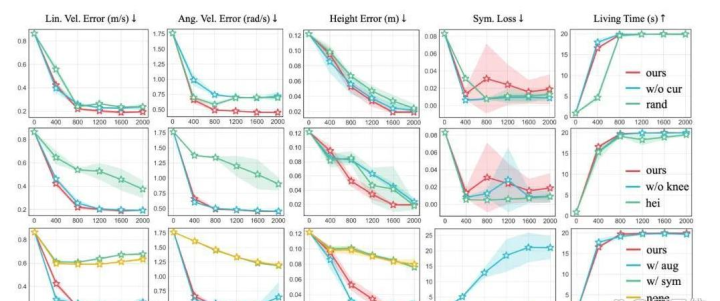
上述论断都标明,HOMIE的历练框架很好的匡助机器东谈主更好的学习完成出动操作任务,不错使东谈主们赢得更好的出动操作底层抑制战术。而且,HOMIE不啻能应用于Unitree G1,运筹帷幄东谈主员还使用不异的框架历练了傅利叶GR-1机器东谈主。扫尾阐述,即使G1和GR-1在结构和尺寸上诀别很大,HOMIE的强化学习框架依然能够让GR-1快速学到稳固的行走和下蹲。
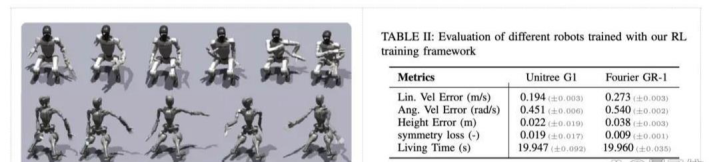
与此同期,运筹帷幄东谈主员对HOMIE的硬件系统进行了系统性的测试,并发现获利于舵机和霍尔传感器的使用,这套低本钱的硬件系统具有极高的反馈频率和姿势获取精度。同期由于同构的瞎想,系统不需要稀疏进行姿势算计和求解,在无需GPU和SoC的前提下依然不错达到远超别的技艺的姿势获取频率。

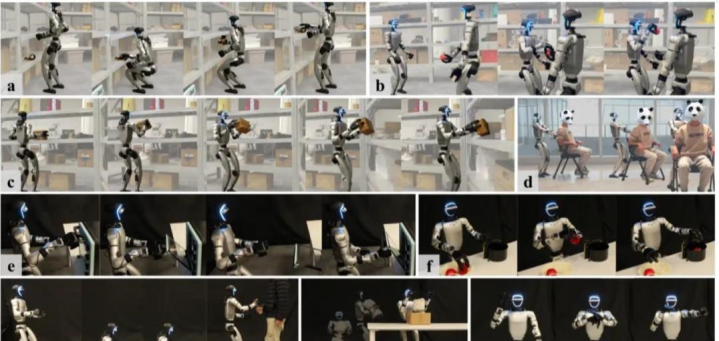
此外,运筹帷幄团队专揽HOMIE在不同环境下完成了丰富的出动操作任务。包括从低货架拿货品到高货架、两东谈主别离用HOMIE一谈完成物体在两台机器东谈主之间的传递、货品搬运、推东谈主前进、开微波炉、捡水平、捧花等复杂的算作,这些任务充分体现了HOMIE遥操东谈主形机器东谈主完成任务的各样性。任务自己对机器东谈主全身和洽智商的高条款也阐述了专揽HOMIE框架历练得到的战术的稳固性。
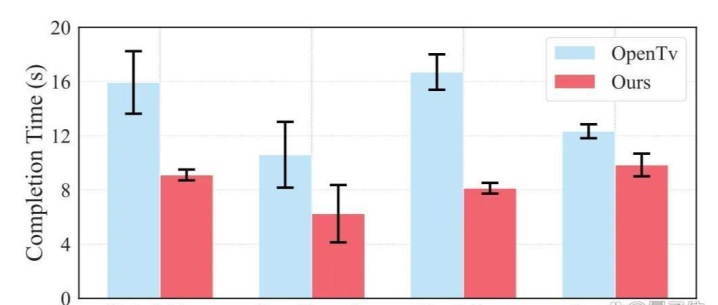
为了展示使用HOMIE的硬件系统进行桌面遥操任务的优厚性,运筹帷幄东谈主员还在4项桌面任务中,用HOMIE和VR有计算(OpenTelevision)别离完成四个不同的桌面任务。最终发现,HOMIE在完成速率上具有显赫上风,尤其在需要精确径向出动的任务中完成速率跳动VR有计算的2倍。
同期,运筹帷幄东谈主员还初步尝试了用HOMIE集中数据历练师法学习算法的可能性。通过不才蹲捡苹果和赠给捡苹果两个任务上别离集中50条数据,并专揽Seer模子进行历练,从而部署到真确机器东谈主上,最终取得了跳动70%的见遵循。
人妻熟女
抽象而言,HOMIE的价值不仅在于本领碎裂,更在于其开源与低本钱特质(整套硬件仅约3500东谈主民币)。现在主流的基于VR的技艺是OpenTelevision,是基于Apple的VisionPro进行操作,现在一台最基本的256G的Vision Pro国内售价约3万东谈主民币,因此其本钱只消VisionPro的约12%。它让东谈主形机器东谈主开脱动捕依赖,像智高东谈主机一样通过“直观化驾驶舱”走入仓库等复杂场景。正如团队所言:巧合不久的改日,每个机器东谈主都会领有我方的“神经衔接驾驶舱”,而HOMIE恰是这条征程上的第一块里程碑。鉴于还是开源,脱手智商强的小伙伴还是擦掌磨拳啰~
 日韩成人av电影
日韩成人av电影